RouteSync
Contents
RouteSync is a licensed add-on feature that sends routes planned on back-office systems directly to CoPilot navigation on a driver’s device. It helps ensure drivers follow prescribed routes in situations where route compliance and consistency are essential.
RouteSync passes a long series of latitude/longitude coordinates of the planned route into CoPilot. CoPilot then generates a route that follows those prescribed coordinates, and it provides feedback with “out-of-route” notifications for drivers and fleet administrators.
RouteSync can be integrated with CoPilot using CoPilot SDK or CPIK, which include APIs that receive predefined locations in a JSON format that includes a string of coordinates as well as other route information and settings.
The managed route information sent to CoPilot can be created using:
-
Your existing back-office systems to send a list of coordinates
-
Trimble Maps RouteSync Web APIs to create a JSON
-
PC*Miler Connect, our DLL for desktop applications, to create a JSON
Typical Uses of RouteSync
RouteSync is designed for routes that require a specific route path to be followed between each stop—whether or not that path matches standard CoPilot routing. Common uses include:
-
Long-haul or local trucking routes, where the origin, destination and intermediate stops for pickups and deliveries are set—with limited changes after dispatch—and you want to make sure the driver follows specific roads between the stops.
-
School bus routes, where the pick-ups or drop-offs are set, and you want the driver to follow a specific planned route between those points.
-
Municipal or utility routes that often involve circling around the same block or doubling back along the same road—with what is a seemingly very inefficient route between a very small number of stops. (Might require special configurations for the best user experience.)
How Does RouteSync Work?
Generating the Route
When CoPilot receives a RouteSync input list for the roads you wish the driver to follow, it generates a route that:
- Ensures all input locations are successfully passed.
- Adheres to any road restrictions for the vehicle routing profile.
During the Trip
A level of route compliance can be sent with the managed route to CoPilot. It indicates how strictly CoPilot should try to return to the original (sent) route in the event that the driver is out-of-route. The three possible compliance levels are:
-
Strict: CoPilot will try to navigate back to the original route at all costs, even if it means the driver needs to turn around and drive back to re-join the prescribed route.
-
Moderate: CoPilot will try to navigate back to the original route but will take into account the driver’s current position; i.e. CoPilot will try to rejoin the prescribed route as it navigates towards the destination, but along a route that is more reasonable than the Strict compliance level would follow.
-
Minimal: The original prescribed route is not taken into consideration. CoPilot re-routes using its default routing logic based on vehicle routing profile settings. The prescribed path will only be rejoined by chance if CoPilot’s logic calculates it as the optimal route to the next stop or destination.
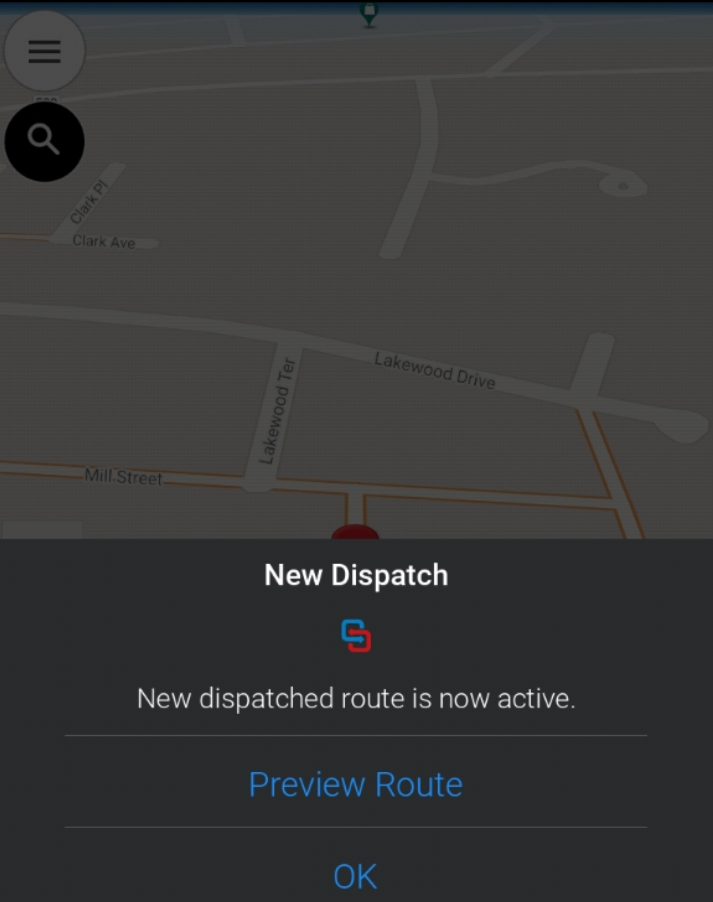
What Does the Driver See?
Once the RouteSync file has been sent to CoPilot, CoPilot will provide a pop-up notification informing the driver that a route has been received. When the file has been downloaded and processing has been completed, a second pop-up will appear. This pop-up will allow the user to accept the route and also to view the details.
Out-of-Route Notifications
If the driver doesn’t follow the prescribed route and deviates onto another road, CoPilot will provide a notification to the client application that the driver is no longer on the planned route. The notification includes latitude, longitude, UTC time and UTC date as well as city, state or country.
Once the driver returns to the route, another notification will be provided, including the distance the user has driven since leaving the route. Notifications will also be provided each time the driver leaves and rejoins the planned route. Once the driver reaches the final destination, a notification for total distance out of route will be provided.
The SDK and CPIK APIs make it possible to set a distance off the planned route the driver is allowed to deviate before a notification alert is generated. The default value within CoPilot is 0.2 miles.
Managed and Unmanaged Route Options
There may be instances when you only wish to have part of the route managed. For example, a situation where navigating from the current location is not important but once the driver reaches the city, it is very important to use specific roads to reach the destination. In this instance, it is possible to have a partially managed route.
With each route that is passed into CoPilot, if the first location is greater than 5 miles from the current GPS position, CoPilot will navigate the user to the first location not under managed conditions. Therefore, if the driver is to leave this initial part of the route:
- There will be no notification as out of route.
- The route guidance will not follow any strict route recalculations to return until the beginning of the managed route section.
Routes on Restricted Roads
What happens when the pre-planned route drives via a road CoPilot believes is restricted? (e.g. A height-restriction that conflicts with the vehicle size.)
Safety is the No. 1 priority. CoPilot will attempt to generate the route requested, but it will not ignore road restrictions. Any road that CoPilot deems “closed” to travel based on physical or legal road restrictions will be avoided. In these scenarios, CoPilot will follow the RouteSync prescribed route as closely as it can, but it will leave the route plan to avoid these closures.
If the driver ignores CoPilot’s instructions, and takes a road CoPilot considers unsafe—for example, a road that is height-restricted because of the vehicle’s dimensions—CoPilot warns the driver they are currently on a restricted road. It also stops all audio and visual guidance for the duration of the restricted road.
CoPilot behaves this way in any similar situation whether or not RouteSync is in use.
Read more about RouteSync:
- Web API Documentation
- CoPilot Feature Guide
- CoPilot CPIK Libraries API Documentation
- CoPilot SDK App API Documentation
Share this article: